

Overview
The interACT project worked on the safe integration of automated vehicles into mixed traffic environments by designing, implementing and evaluating solutions for safe, cooperative and expectation-conforming interaction of the Automated Vehicles with both its on-board user and other road users. With a total budget of 5.5 million Euros funding by the European Commission, 8 partners from 4 European Countries worked together from 2017 to 2020 and joined their expertise to contribute to the vision of designing a cooperative interaction of automated vehicles with other road users in mixed traffic environments.
As the interACT project was coming to its end, our consortium had organized its Final Event on 1st April 2020 to be held in Munich Germany. In light of COVID-19 breakout and related containment measures, the interACT consortium decided to turn the physical interACT Final Event into a Virtual one as to secure all participants’ safety and health.
Within this context, the consortium organized a two-day online event on the 18th and 19th of June at 13:00 CEST in order to present its produced results after more than 3 years of research work made. During the online event, the interACT project partners presented the most important interACT scenarios; the acquired knowledge after observing human interaction in real traffic; the external eHMI of two test vehicles of the project for the safe integration of automated vehicles in mixed traffic and the results from the impact assessment and impact studies in the areas of road safety and traffic.
Key Results in Brief
Results Human interaction behavior
- Definition of interaction terminology
- Several observation studies on human-human interaction in Greece, Germany and the UK
- Traffic participants tend to avoid conflicts; Interactions are more likely to occur when the vehicle is driving slowly; Pedestrians mostly focus on implicit vehicle cues rather than explicit communication
Results Intention recognition
- Risk analysis framework for the prediction of traffic participants location
- Pedestrian intention prediction using the semantic map and behaviour models of other traffic participants
- Novel deep learning techniques, for classification of pedestrians’ head orientation and hand waving gestures
- Hidden Markov model for vehicle maneuvers recognition and generation of intention-aware trajectory.
- Extended vehicle prediction trajectory via fusion of intention-based with typical motion-based
Results Communication and Cooperation Planning Unit
- Recognition of traffic conflicts between Automated Vehicles and other traffic participants
- Implementation of reaction strategies according to the identified situation (future path constraints, candidate actors for HMI/eHMI interaction)
- Integration of internal and external HMI to enable human-like interaction
- Development of safety layer for emergency situations
Results HMI/eHMI
- Two interaction strategies defined: intention-based & perception-based strategy for HMI/eHMI
- Two eHMI technologies developed and implemented: 360° Light Band & Directed Signal Lamp
- Two iHMI technologies: Light Band & Automation Display
Results Evaluation methodologies
- Evaluation criteria and methodologies derived for Automated vehicles
- interACT demonstrators evaluated in test-track studies, while eHMI/iHMI solutions were also evaluated using driving and pedestrian simulator
- Impact assessment carried out to understand the effects of the interACT solutions on safety, traffic flow, criticality, comfort, and acceptance
First Day of the Virtual Final Event
The first day (June 18th, 2020) three presentations were made by:
- Mr. Marc Wilbrink (DLR eV, Germany)
- Mr. Andre Dietrich (Technical University of Munich, Germany)
- Mr. Giorgos Drainakis (ICCS, Greece)
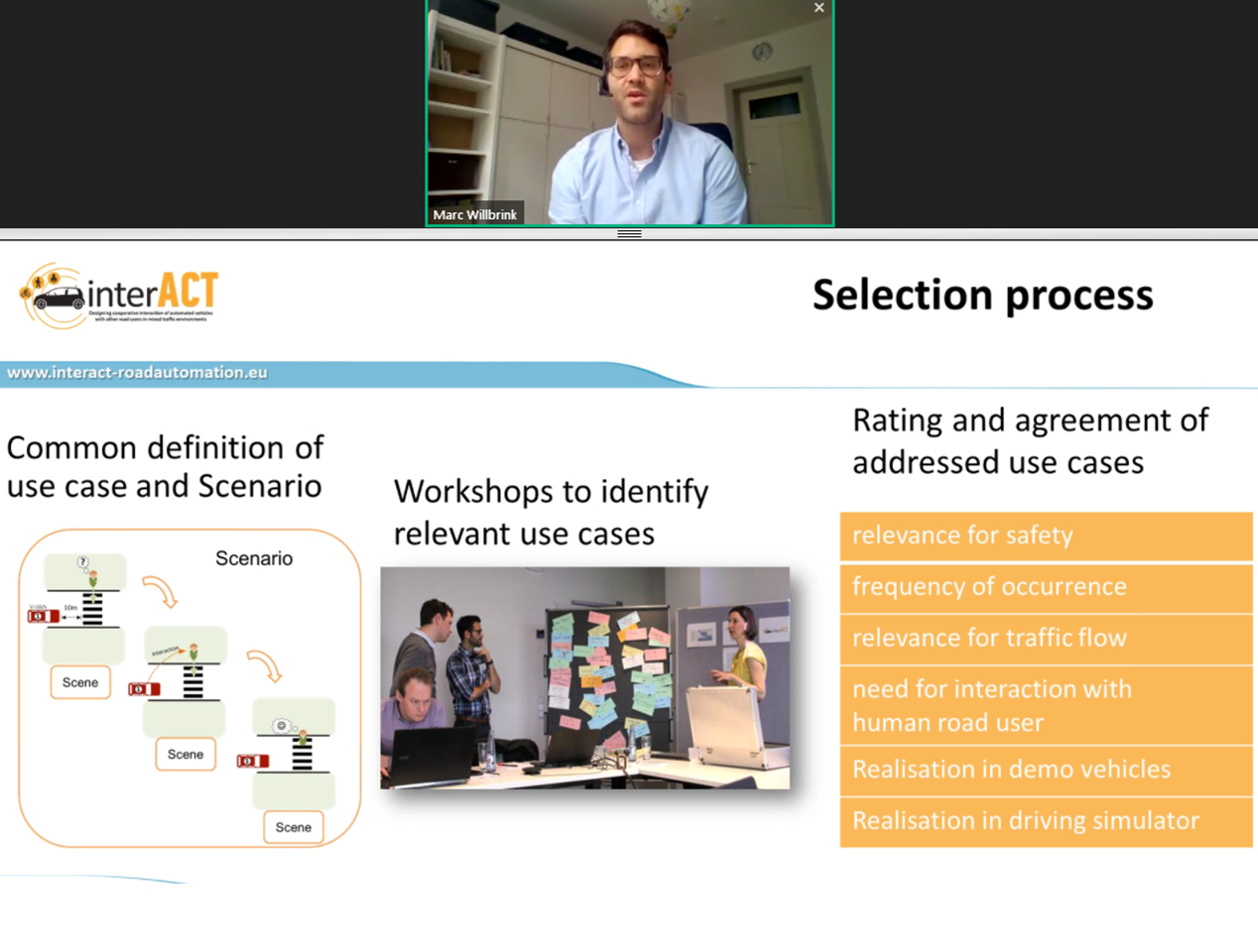
At the beginning of Day 1, Mrs. Anna Schieben welcomed the audience (online attendees) and briefly presented the interACT project and its vision. Later on, Mr. March Wilbrink (DLR eV, Germany) took the floor where he presented the interACT scenarios. A Q&As session followed where the co-moderator Mrs. Natasha Merat (ITS Leeds, UK) addressed audience’s queries to Mr. Wilbrink.
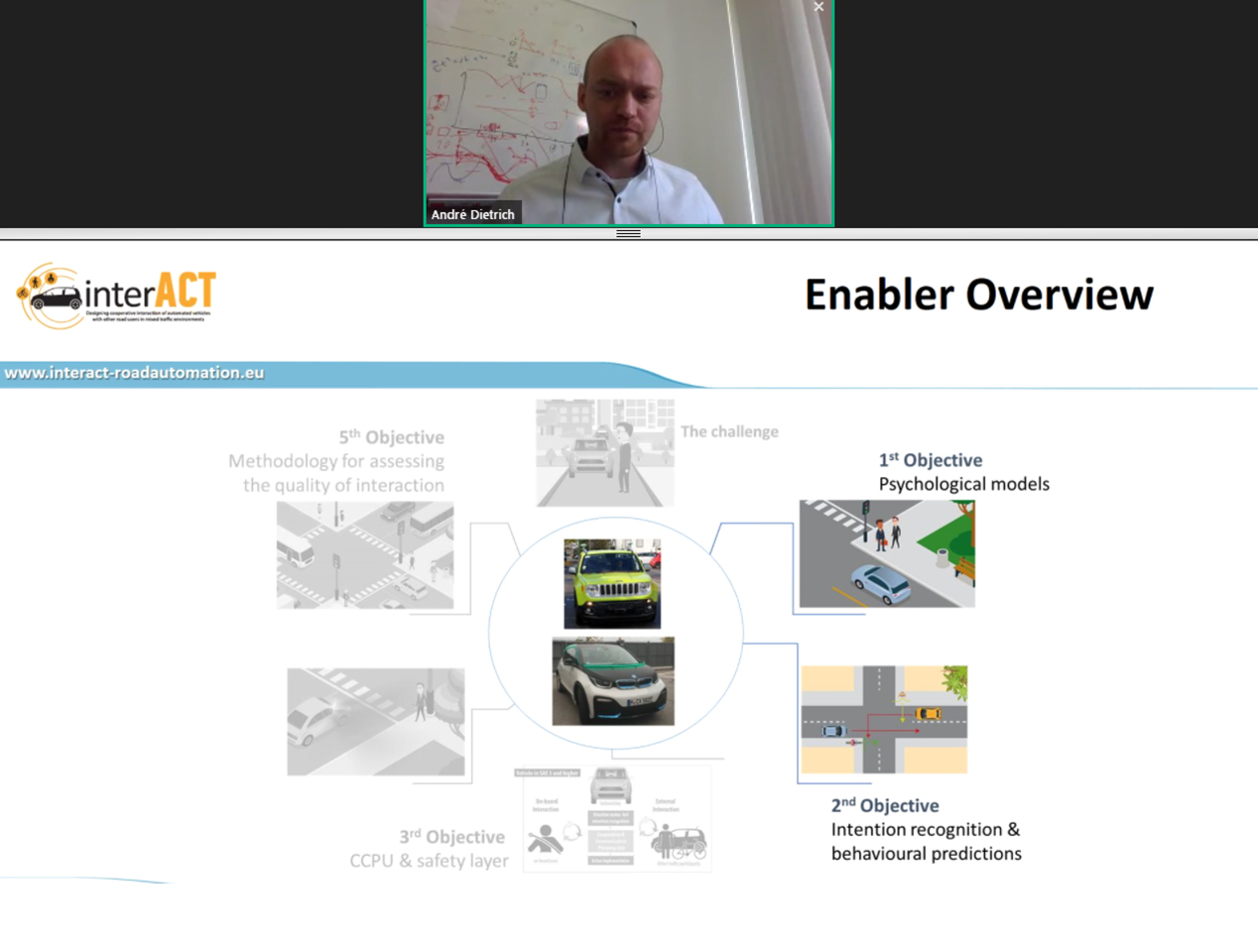
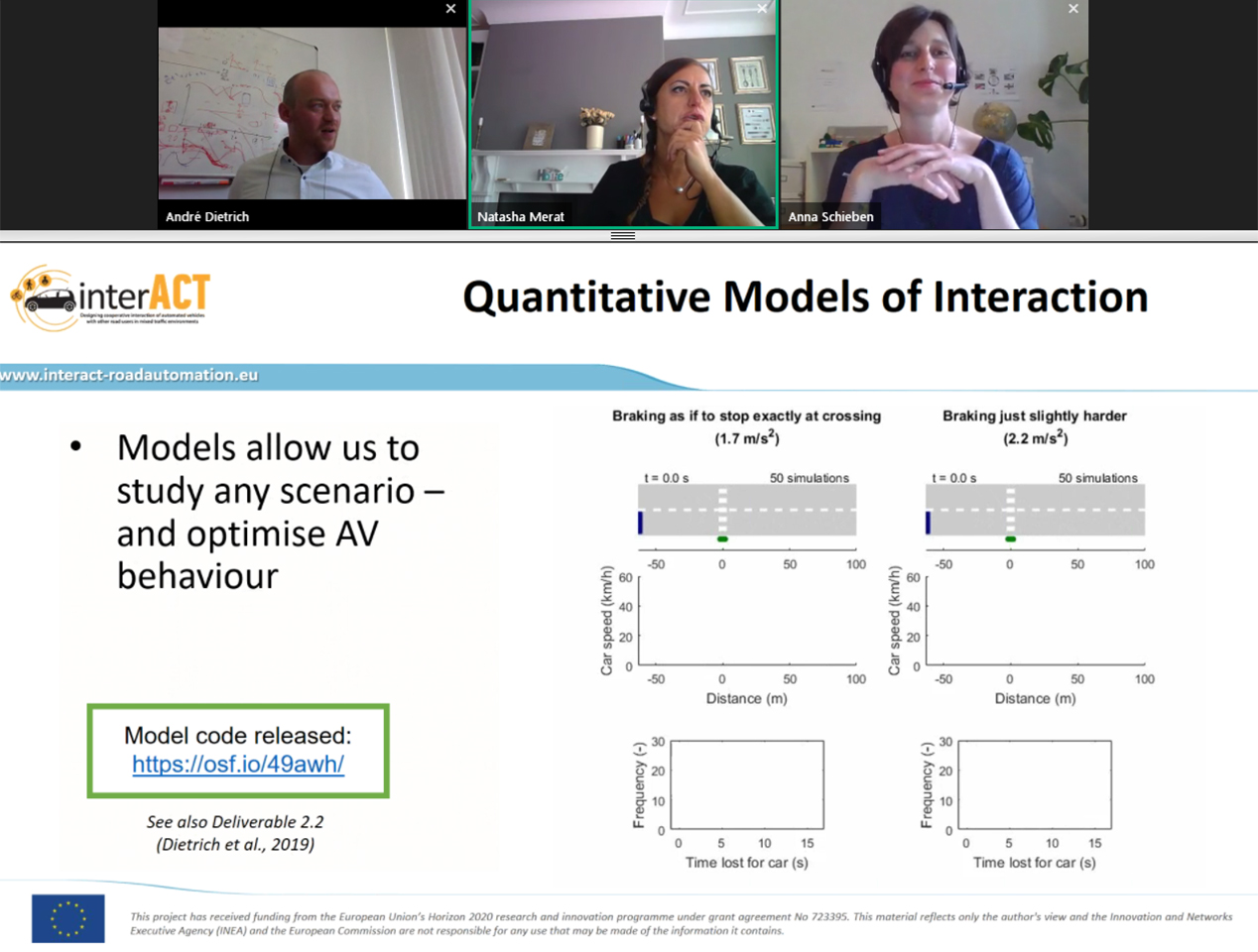
The presentations continued with one entitled “Observing human interaction in real traffic – what we learned for interACT” made by Mr. Andre Dietrich (Technical University of Munich, Germany). Several questions were raised by the audience and answered during the respective Q&As session.
The last presentation of Day 1 was made by Mr. Giorgos Drainakis (ICCS) with the title “From situation awareness to cooperation and communication planning of automated vehicles for their safer integration in mixed traffic: a modular approach”. Throughout the presentation the audience had the opportunity to send their questions via the question box of the GoTo Webinar tool. After the end of Mr. Drainakis’ speech, Mrs. Natasha Merat (co-moderator of the event) asked the speaker all questions received. The first day of the event was wrapped up by Mrs. Anna Schieben (DLR e.V. , Germany) and Mrs. Natasha Merat (ITS Leeds, UK).
Highlights from Day 1
-

- The moderators of the interACT Virtual Final Event, Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) while welcoming the audience.

-
- Mr. Marc Wilbrink (DLR eV, Germany) while presenting “The interACT scenarios – defining and documenting essential urban scenarios for the development and evaluation of interACT solutions”
-
- Mr Andre Dietrich (Technical University of Munich, Germany) while presenting “Observing human interaction in real traffic – what we learned for interACT”
-
- Q&A session moderated by Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) after Mr. Andre Dietrich (Technical University of Munich, Germany) presentation.
-

- Mr. Giorgos Drainakis (ICCS, Greece) making the presentation entitled “From situation awareness to cooperation and communication planning of automated vehicles for their safer integration in mixed traffic: a modular approach”

-
- Q&A session moderated Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) after Mr. Giorgos Drainakis (ICCS, Greece) presentation.

-

- Mrs. Anna Schieben (DLR eV, Germany) wrapping up Day 1 of the online event.

Second Day of the Virtual Final Event
The second day (June 19th, 2020) four presentations were made by
- Mr. Tom Alkim (European Commission)
- Mr. Marc Kaup (Hella, Germany) and Mr. Florian Weber (BMW, Germany)
- Dr. Fabio Tango (CRF, Italy)
- Dr. Yee Mun Lee (ITS, Leeds, UK)
At the beginning of Day 2, Mrs. Anna Schieben (DLR eV, Germany) welcomed the audience (online attendees) and made a summary of Day 1. The first presentation of Day 2 was given by our keynote speaker Mr. Tom Alkim, Policy Officer Connected & Automated driving at the European Commission, Directorate General Research & Innovation. Our consortium was very honored as Mr. Tom Alkim accepted the invitation of the interACT project team to participate to our Virtual Final Event and present the EU perspective on CCAM.
A Q&As session followed where the co-moderator Mrs. Natasha Merat (ITS Leeds, UK) addressed audience’s queries to our keynote speaker.
Later on, Mr. Marc Kaup and Mr. Florian Weber took the floor to present “Developing interaction strategies and novel HMI concepts”. A Q&As session followed where the co-moderator Mrs. Natasha Merat (ITS Leeds, UK) addressed to speakers the audience’s queries.
Dr. Fabio Tango (CRF, Italy), continued the presentation’s sessions and talked about “Integration and technical Testing of the interACT demonstrator vehicles”. A Q&As session followed where the co-moderator Mrs. Natasha Merat (ITS Leeds, UK) addressed audience’s queries to Dr. Tango.
The last presentation for Day 2 was made by Dr. Yee Mun Lee (ITS Leeds, UK) and it was entitled “Testing the interACT solutions: Methodologies and results for evaluation and impact assessment”
Throughout the 35’min presentation of Dr. Lee the audience was sending questions regarding the studies discussed and Mrs. Natasha Merat (ITS Leeds, UK) addressed to the speaker all queries raised.
At the end of Day 2, Mrs. Anna Schieben together with the co-moderator Mrs. Natasha Merat made a short evaluation using the online tool slido.com by asking the audience about their view around the presented results and overall the event. The two-day event was closed by Mrs. Anna Schieben presenting the conclusions of the interACT project.
Highlights from Day 2
-
- Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) while opening Day 2 of the interACT Virtual Final Event
-

- Keynote speaker, Mr. Tom Alkim, Policy Officer Connected & Automated driving at the European Commission, Directorate General Research & Innovation while presenting the EU perspective on CCAM.

-
- Mr. Marc Kaup (Hella, Germany) and Mr. Florian Weber (BMW, Germany) while presenting “Developing interaction strategies and novel HMI concepts”
-

- Q&A session moderated Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) after Mr. Marc Kaup (Hella, Germany) and Mr. Florian Weber (BMW, Germany) presentation.

-
- Mr. Fabio Tango (CRF, Italy) while presenting “Integration and technical Testing of the interACT demonstrator vehicles”
-
- Q&A session moderated Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) after Mr. Fabio Tango (CRF, Italy) presentation.
-

- Dr. Yee Mun Lee (ITS Leeds, UK) while presenting “Testing the interACT solutions: Methodologies and results for evaluation and impact assessment”.
-

- Q&A session moderated Mrs. Anna Schieben (DLR eV, Germany) and Mrs. Natasha Merat (ITS Leeds, UK) after Dr. Yee Mun Lee (ITS Leeds, UK) presentation.

-

- Mrs. Anna Schieben (DLR eV, Germany) while presenting the conclusions of the interACT project

-

- Mrs. Anna Schieben (DLR eV, Germany) while closing the two-day online event
